
December 2013
Jaroslav Kopernicky
Jan Onderco
Abstract
The purpose of this research is to analyze uniform circular motion of a steel ball pushed by two springs against force sensors with a limited freedom of motion in a box that is mounted on a wheel in a moving reference frame and in the ground reference frame by using Galilean transformation. Before a reader dismisses the subject as a straightforward problem that is well understood by the current physics the authors ask a simple question.
What happened to the centrifugal acceleration of a free body in a cycloid motion? Why it is not considered together with the tangential and centripetal accelerations? This is an underlying motto of this research, please, keep reading to find out.
Introduction
The first postulate of the Special Relativity says:
The laws by which the states of physical systems undergo change are not affected, whether these changes of state be referred to the one or the other of two systems of coordinates in uniform translatory motion. OR: The laws of physics are the same in all inertial frames of reference.
From Wikipedia[1]
The following lines are my explanation of what Jaroslav Kopernicky pointed out to me in one of our discussions.
The question: Does the first postulate apply to the tangential and radial accelerations and their vector sum of an object moving in an uniform circular motion observed from two inertial frames of reference when the outer reference frame combines the uniform circular motion with a uniform translatory motion.
For example if we take a horizontally oriented wheel, its axle is perpendicular to the ground and we keep it moving at:
- constant angular velocity (uniform circular motion) fixed to the ground
- constant angular velocity (uniform circular motion) on a moving train/car – straight line, constant velocity, the vertically oriented wheel axle is attached to the moving frame
What measurements do we get for the tangential and radial acceleration components from an accelerometer mounted on the wheel? The accelerometer would be a steel ball in a box mounted on the wheel. The ball has a limited freedom of motion in two horizontal directions, it’s not attached to the wheel and it does not form one rigid body together with the wheel. There are force sensors mounted inside of the box walls. The steel ball is being pushed by two adjustable springs onto the force sensors. The force sensors change their resistance based on how much force is being applied. The change of the resistance leads to a voltage change, then there is an A/D converter, the data is being captured by a computer and transmitted to the world and the force readings can then be translated into the accelerations and/or kinetic energy changes. I guess a picture is worth a thousand words.

Figure 1: The steel ball box with FlexiForce® sensors

Figure 2: A top view of our hovercraft with the steel ball box on the wheel
It’s obvious that the ground being our fixed reference frame with no velocity and a train/car/hovercraft moving in a straight line at a constant velocity are inertial frames of reference. The rotating wheel is an experiment within our inertial reference frames.
Based on the first postulate of the Special Relativity we are not supposed to detect uniform motion within the inertial reference frame without any signal from outside. If we succeed then we can state that the first postulate is not valid.
Here comes Jaroslav Kopernicky’s observation and discovery. The steel ball on the wheel on the train/car/hovercraft is moving in a cycloid motion when observed from the ground reference frame which brings acceleration and deceleration of a body with its own inertia into the picture! This is a top view of a cycloid that describes our experiment:
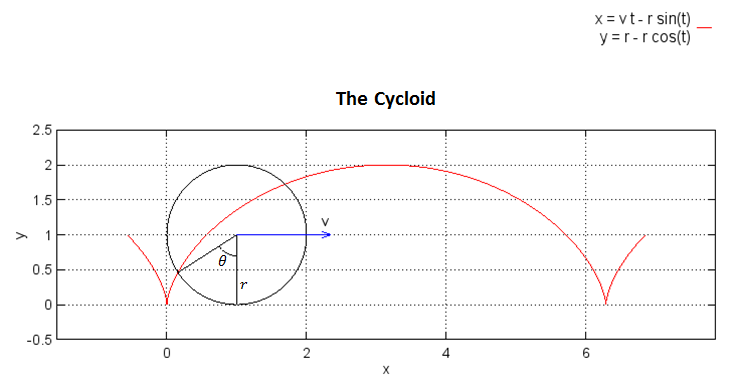
Figure 3: The Cycloid
Nomenclature summary
– cycloid subscript referencing cycloid equations and values in the ground inertial reference frame
– circle subscript referencing circle equations and values in the moving inertial reference frame
– the angle of the rotation of the circle in radians
; the angular velocity of the circle
; corresponds to the angle therefore in our plots
– the velocity of the moving frame; in our plots
– the radius of the wheel; in our plots
– the speed of light
The analysis
A circle of radius r, consisting of the points (x, y);
The textbook cycloid equations.
The textbook circle equations.
The first derivatives are the velocities;
The and are components of the tangential velocity vector and the calculation of the magnitude is a straightforward vector sum.
Now we are at one of the most intriguing and puzzling crossroads in physics. There are three ways to continue our analysis of the cycloid accelerations:
1 – calculate the kinetic energy of a particle as observed in the ground and moving reference frames.
2 – calculate the derivative of to obtain the magnitude of the acceleration of such a particle.
3 – calculate the derivatives of and and combine them to obtain the magnitude of the acceleration.
1. The kinetic energy analysis
“The kinetic energy EK of the particle is defined as
Eq.4
and is the total work which must be done on the particle to bring it from a state of rest to a velocity v”.[2]
The kinetic energy of the steel ball in both inertial reference frames is;
or
This is a combination of the kinetic energy of circular motion plus time-varying velocity due to cycloidal motion in the ground reference frame.
Textbook result for the kinetic energy of particle moving in a constant circular motion.
The kinetic energy change predicts some work to be done on the ball in the ground reference frame as a function of time changing velocity, in other words we expect force magnitude changes based on the work-energy principle but we do not expect any force magnitude changes in the moving reference frame since the steel ball moves in a uniform circular motion therefore there is no work done on the ball from the moving reference frame point of view.
This is a discrepancy between the “two inertial reference frames” and it’s a clear contradiction to the first postulate of the Special Relativity.
Many physicists expressed their opinion how the Special Relativity is straightforward and simple. The three steps: position, velocity, kinetic energy that undermine the first postulate of SR are arguably even more simple.
These are unprecedented claims and it’s a perplexing situation that demands experimental proof to resolve this puzzle. How come nobody noticed it before? The answer is hidden in the Eq.5?!
When condition
Cnd.1
is true then the kinetic energy in the ground reference frame is close to being the same as the kinetic energy in the moving reference frame because being orders of magnitude less than results in contributing very little to the velocity change therefore in this case we can write
Eq.6
The equations Eq.6 and Eq.5O are equal. No force magnitude changes are expected in both inertial reference frames.
When condition
Cnd.2
is true then being orders of magnitude less than results in contributing very little to the velocity change therefore in this case we can write
Eq.7
The kinetic energy is constant in the ground reference frame and no force magnitude changes are expected.
An observer in the moving reference frame has two options.
then the observer will come to the same conclusion as the observer in the ground reference frame – Eq.7.
then the observer in the moving reference frame sees only rotation and the Eq.5O applies.
Nevertheless no force magnitude changes are expected for the observer in the moving reference frame in both instances.
When condition
Cnd.3
then the Eq.5? and Eq.5O are not equal. The accelerometer based on the steel ball does not ‘care’ about any reference frames. It reports only one set of data to both observers, in the ground reference frame and in the moving reference frame.
What data do we get? Is there a change in the force magnitude as expected per Eq.5? or there is no change as per Eq.5O?
The best real life examples that point to the correct answer are related to one type of the critical speed that rises from rotating systems with an imbalance in them that are in a linear motion when . An observed vibration as also seen in our experiments implies that the data is expected to correlate with Eq.5?. The ground reference frame is the preferred one in this case.
Another excellent experiment/proof might be satellite flyby anomalies (Wikipedia)[5]. The Earth’s and the satellite speeds in the Solar system are in the same range therefore the satellite accelerations are also a function of the Earth’s and the satellite speeds and an angle between the Earth’s and satellite orbital planes.
Our experiment
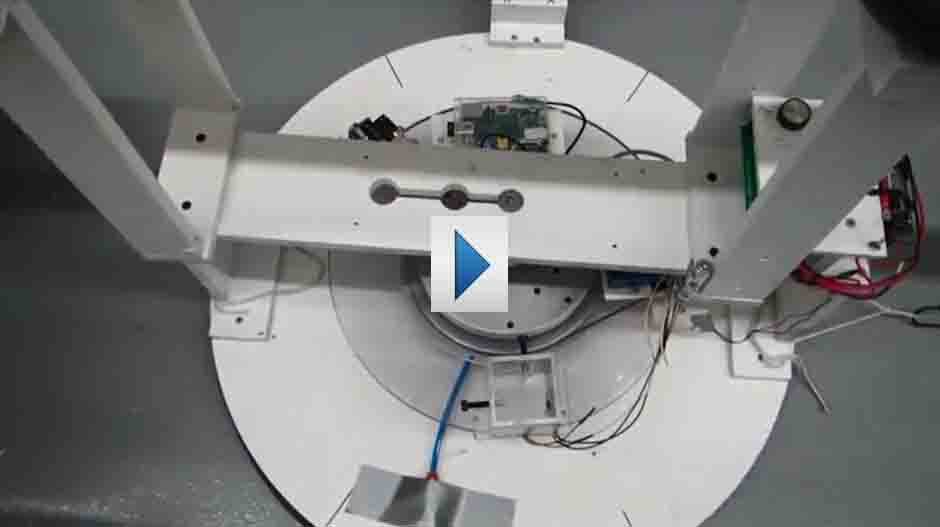
Video: The experiment setup[4]
The steel ball – 226g is placed 0.14m from the wheel center.
The circumference is;
Our force sensors voltage range 0V – 5V represents force range from 0N – 20N.
Assuming the first postulate of the Special Relativity is valid we expect the centrifugal force prior to the motion being equal to the centrifugal force during the uniform translatory motion with the exception of a noise.
—– RUN #1 —–
[V]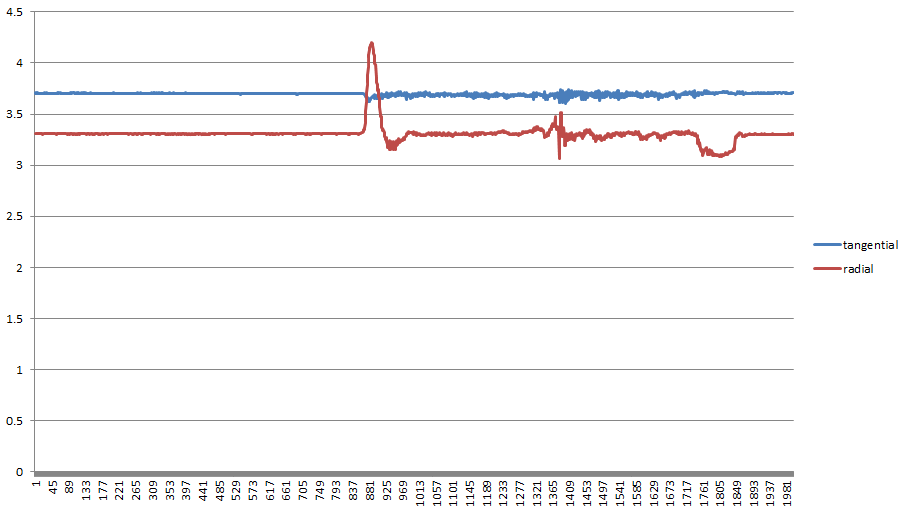 [0.01s]
[0.01s]
Chart 1: No wheel rotation, only linear motion
The hovercraft speed 0.5m/s (10V on the pulley power supply that pulls our hovercraft).
Blue line – the wheel tangential force sensor readings
Red line – the wheel radial force sensor readings
The linear motion starts at around 8.7s; there is no motion prior to that point in time; the box is at the front of the hovercraft therefore the radial force sensors registered the force spike; the linear motion ends at around 18.5s; the bump in the middle of the track (limited options for the experiment track) is clearly visible but otherwise it’s just a small noise.
Video Run #1: The linear motion, no wheel rotation[4]
—– RUN #2 —–
[V] [0.01s]
[0.01s]
Chart 2: Low angular velocity of the wheel and linear motion
The hovercraft speed 0.5m/s (10V on the pulley power supply that pulls our hovercraft).
Blue line – the wheel tangential force sensor readings
Red line – the wheel radial force sensor readings
The frequency of rotation is 0.36 rps ~ 0.32m/s
The linear motion starts at around 8.4s and ends at around 18.4s; the wobble comes from imbalanced wheel; the chart shows that there is very little difference between the stationary rotation and the rotation during the linear motion. We can see only a noise.
The RUN #2 is in the range of the Cnd. 3 of the kinetic energy analysis when . The inertia of the steel ball though does not generate the centrifugal force that is big enough and detectable over the noise.
Video Run #2: The linear motion, the slow wheel rotation[4]
—– RUN #3 —–
[V]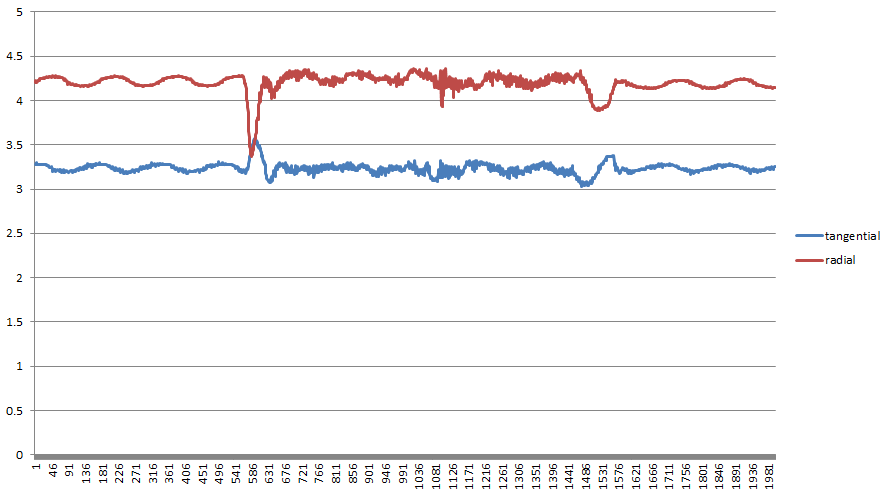 [0.01s]
[0.01s]
Chart 3: Medium angular velocity of the wheel and linear motion
The hovercraft speed 0.5m/s (10V on the pulley power supply that pulls our hovercraft).
Blue line – the wheel tangential force sensor readings
Red line – the wheel radial force sensor readings
The frequency of rotation is 0.59 rps ~ 0.52m/s
The linear motion starts at around 5.7s and ends at around 15.7s; the chart still does not show much difference between the stationary rotation and the rotation during the hovercraft linear motion.
The RUN #3 is in the range of the Cnd. 3 of the kinetic energy analysis when . The inertia of the steel ball still does not generate the centrifugal force that is big enough and detectable over the noise.

Video Run #3: The linear motion, the medium wheel rotation[4]
—– RUN #4 —–
[V]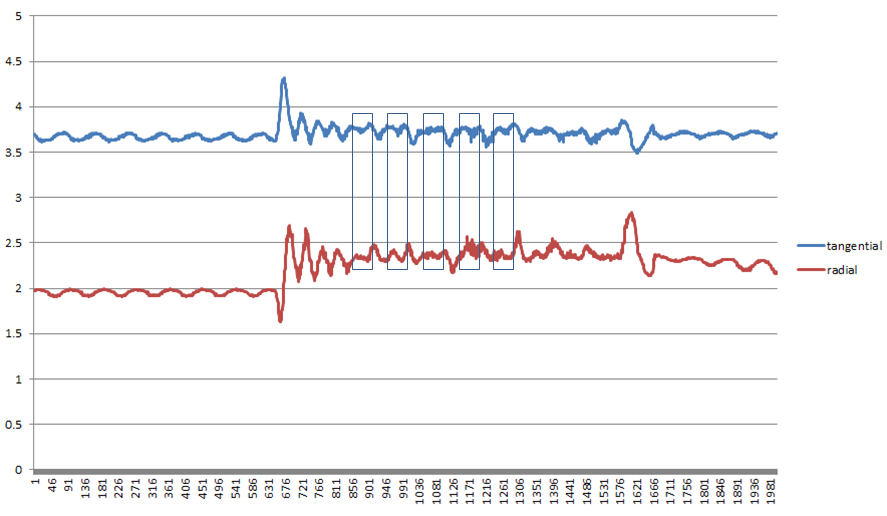 [0.01s]
[0.01s]
Chart 4: High angular velocity of the wheel and linear motion
The hovercraft speed 0.5m/s (10V on the pulley power supply that pulls our hovercraft).
Blue line – the wheel tangential force sensor readings
Red line – the wheel radial force sensor readings
The frequency of rotation is 1.11 rps ~ 0.98m/s
The linear motion starts at around 6.4s and ends at around 16.4s; the selected chart areas point to a voltage dips that are not supposed to be there if the first postulate of the Special Relativity was true and readings would show noise filled line similar to the one prior to the linear motion starting at 6.4s as it is the case in the previous runs.
The explanation of our measurement follows in the next chapter and the Figure 14 is the best fit to show what is happening.
Our force sensors voltage range 0V – 5V represents force range from 0N – 20N. The chart shows we operate in 0.1N to 1N range and this is well above any Coriolis force effect observable in Toronto, Ontario, Canada.
The RUN #4 is in the range of the Cnd. 3 of the kinetic energy analysis when . The inertia of the steel ball does generate the centrifugal force that is big enough and detectable over the noise.
Video Run #4: The linear motion, the fast wheel rotation[4]
2. The derivative of analysis
Now we are back at the crossroads and let us investigate the derivative of .
The equations Eq.3? and Eq.3O give us a starting point. They show that the cycloid tangential velocity magnitude in the ground frame changes, it is a function of . The circle velocity magnitude in the moving frame is constant.

Figure 4: The cycloid and the tangential velocity magnitudes plotted on the same graph for convenience
This is a very important finding because velocity derivatives are not going to be equal as well. If the tangential velocity magnitude changes in the ground frame then what is the tangential acceleration magnitude in the ground frame? What is the tangential acceleration magnitude in the moving frame?
In the ground reference frame Eq.8?
In the moving reference frame Eq.8O
Here is a plot with the tangential acceleration magnitudes.

Figure 5: The cycloid, the tangential velocity magnitude and the tangential acceleration magnitude
The points 0, 2?, 4?, … represent cusps. The acceleration is undefined here. The reason is a change from the acceleration -1 (the maximum deceleration) to the maximum acceleration 1. This can happen only through a singularity. The acceleration changes to deceleration at the ?, 3?, 5?, … points.
The cycloid tangential acceleration is a function of t as it is described in a previous paragraph and the circular motion has 0 tangential acceleration. Let us rename to and to .
The trajectories in both reference frames are curved so in order to obtain the full picture we need to analyze the radial acceleration as well.
The radial acceleration is responsible for the velocity vector rotation. The radial acceleration keeps the velocity vector always tangential to the curved trajectory, it is a function of the velocity and the radius.
Eq.9
Radius is defined by a curvature of the trajectory.
Eq.10
The curvature[2] is
Eq.11
The cycloid curvature is Eq.12?
The circle curvature is Eq.12O
Let us recap the equations 3, 8, 13.
Eq.3?, Eq.8?, Eq.13? and new Eq.14?
Eq.14?
Eq.3O, Eq.8O, Eq.13O and new Eq.14O
Eq.14O
The in Eq.14? is the total net cycloid acceleration in the ground reference frame. The in Eq.14O is the total net circle acceleration in the moving reference frame.
The cycloid acceleration in the ground reference frame is
Eq.15?
We come to a conclusion that both accelerations, cycloid and circular are the same. It appears that cycloid tangential and radial accelerations complement each other. When the tangential acceleration decreases then the radial increases and the other way around as it can be seen in the Figures 8 – 14. Their vector sum ends up in the same vector as we have in the circular motion. It appears that based on Eq.14? and Eq.14O being equal there is a conflict with the kinetic energy analysis equations Eq.5? and Eq.5O. How to solve this puzzle? The answer is the inertia!
Anybody advocating Eq.14? and Eq.14O being equal has to answer the following question. Where is the centrifugal acceleration? Why is it omitted? As Jaro Kopernicky points out the inertia is inherent in the mass. It can not be ignored!
The centrifugal and centripetal accelerations are in 90o angle to the tangential acceleration. They do not contribute to the work done on the ball but both forces are present, they are inseparable.
If we imagine our steel ball rolling on a table then the gravity and the table with its legs pushing back against the gravity do not perform any work but they are inseparable as well. Any change in the kinetic energy is a result of the horizontal component of a force applied on the steel ball.
Applying the same logic we come to a conclusion that the cycloid kinetic energy change in the ground reference frame comes from the tangential acceleration only, therefore there is no discrepancy between the kinetic energy analysis and the derivative of analysis. The analysis shows the difference between the acceleration/force in both inertial reference frames in accordance with the kinetic energy analysis once the inertia of the free body is properly accounted for and undermining the first postulate of the Special Relativity as well.
Rigid body, string and gravity
The Figure 6 shows direction of the tangential, the centripetal and the centrifugal accelerations.

Figure 6: The cycloid accelerations for a rigid body
The rigid body holds point B in place and it does not allow it to accelerate along the direction of the tangential acceleration.
If the ball/body B was attached to the center with a string or it was flying through a space around a planet then there are only two forces acting on the ball/body. It is:
- the string or gravity from the center
- the centrifugal force caused by the inertia
The end result is the tangential acceleration that will increase the velocity for the ball on the string and it’s trajectory will become more prolate/spiral. The body flying through a space will increase its velocity and its trajectory will be elliptic.
The Figure 7 shows direction of the tangential and the centrifugal accelerations. There is nothing that can hold the ball/body back therefore they will speed up along the tangential acceleration.

Figure 7: The cycloid accelerations for a string and gravity
Prolate and Curtate Cycloids
Let us see what is happening when the trajectory is not a perfect cycloid.
The plots when the velocity of the moving frame is greater than the angular velocity of the rotating circle which is equal to 1m/s.
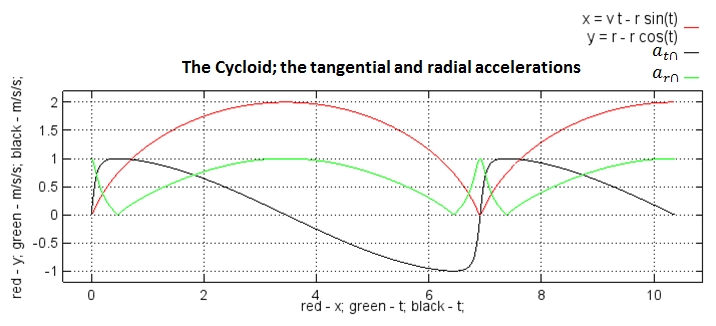
Figure 8: The velocity 1.1m/s Red-cycloid; Black-tangential acceleration; Green-radial acceleration
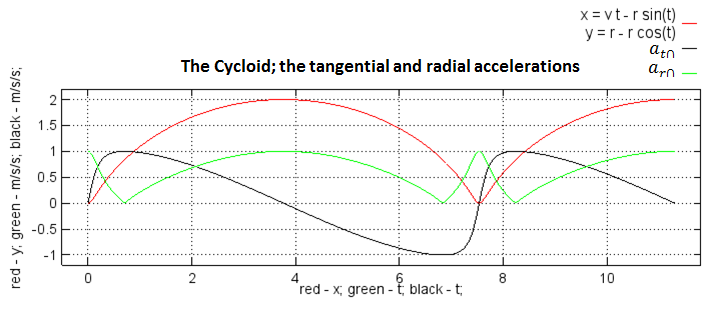
Figure 9: The velocity 1.2m/s Red-cycloid; Black-tangential acceleration; Green-radial acceleration

Figure 10: The velocity 1.5m/s Red-cycloid; Black-tangential acceleration; Green-radial acceleration
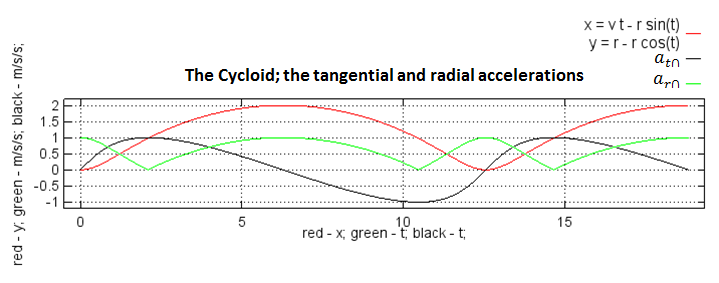
Figure 11: The velocity 2.0m/s Red-cycloid; Black-tangential acceleration; Green-radial acceleration
The plots when the velocity of the moving frame is smaller than the angular velocity of the rotating circle which is equal to 1m/s.
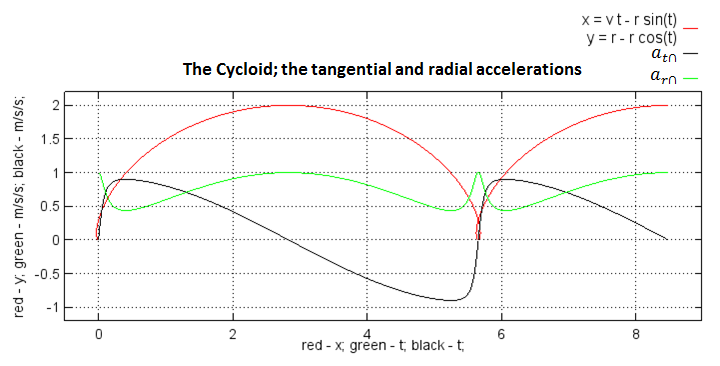
Figure 12: The velocity 0.9m/s Red-cycloid; Black-tangential acceleration; Green-radial acceleration

Figure 13: The velocity 0.8m/s Red-cycloid; Black-tangential acceleration; Green-radial acceleration

Figure 14: The velocity 0.5m/s Red-cycloid; Black-tangential acceleration; Green-radial acceleration
When we observe the Figure 14 and the area from 2.5 up to 3.7 we can see a maximum deceleration around 2.6 and maximum acceleration around 3.6 when a point on the wheel travels through ‘the loop’ at ?. This explains the Chart 4 readings.
3. The derivatives of and analysis
Now we are back at the crossroads and let us investigate the derivative of and for both reference frames.
The equations Eq.2? and Eq.2O give us a starting point.
Yes, the equations are equal but having seen the kinetic energy analysis now we know that these equations can be used only in cases when and are not in the same range.
The conclusion
The steel ball – accelerometer with the limited freedom of motion does not have a clue about the circular motion or the translatory motion of inertial reference frame. It follows the cycloid tangential and radial accelerations. These are as real as they can get. The centrifugal force as the consequence of the inertia and the centripetal force of the wheel cancel each other and the tangential force change is the reason for the kinetic energy fluctuation from 0 at the 0, 2?, … points to its maximum at the ?, 3?, … points in the case of an ideal cycloid motion.
Jaroslav Kopernicky’s claim seems to be proven. He calls the tangential acceleration changes a mobiloscopic effect. We have a device that can detect an uniform translatory motion!
The first postulate of the Special Relativity is proven to be false.
The logical consequence is that there is always a higher/preferred frame of reference up to the first absolute frame of reference. The Earth orbits the Sun; The Sun orbits the center of the Milky Way; The Milky Way flies in a cluster with other galaxies;…
The Universe spins around an axes.
The Big Bang started with a huge spin.
Jaroslav Kopernicky’s comments
Inertial Tendencies of the Massive Body
Following the Path of the Cycloid.
Inertia, accordingly to Newton’s views, appears inherent and independent for every single particle.
This assumption raises an importance of the behavior – inertial changes – of the body having mass, moving on the cycloid path.
One of early examples was the toy carousel equipped with two pendulums positioned diagonally on the carousel. When the rotating carousel moves in the plane of rotation, pendulums of equal length and weight fly in different levels; One advancing with the movement of the carousel flies higher, while one moving momentarily in the opposite direction flies lower. Each pendulum moves on its own cycloid path.
When carousel rotates stationary, pendulums fly at the same level.
The mercury switch replacing the pendulum makes an intermittent (On – Off) connection when the rotating carousel moves. But when carousel rotates stationary – not moving laterally – the switch keeps only one position.
This phenomenon provides possibilities of indication and measurements of the uniform movement, its speed and direction. It also has potential to indicate and explain observations in astronomy (zone convenient for life) and geology (tides, prediction of earthquakes, etc).
This Jano Onderco’s analysis and connected experiments are welcomed contributions to the further understanding of the phenomenon.
Jaroslav J. Kopernicky
January 16th, 2014
George Hathaway’s comments
If there is any traction to Jaroslav Kopernicky’s Mobiloscopic Effect, perhaps it can be explained as follows. It has been surmised that a rotating body produces its own reference frame. Since the rotation is at all times around a single point even though that point may be moving with constant velocity with respect to the external world, there is a radially-directed acceleration. Even if this rotating body is moving with constant or time-varying motion with respect to another (inertial) frame, at every instant it is producing its own (new) “accelerated” reference frame. Therefore, the turntable on the track is producing at every instant, a local “accelerated” frame with its own radially-directed acceleration. The Mobiloscopic system is composed of an “accelerated” frame moving with respect to an inertial frame. This may allow the detection of constant motion of the “accelerated” frame with reference to the inertial frame. The term “accelerated” is in quotes here because it is not clear whether a rotating body actually produces a true non-inertial/accelerated reference frame. In space, a rotation in one direction has to be countered by a similar rotation in the opposite direction, accounting for moment of inertia. Whether one rotation cancels the creation of an “accelerated” frame by the opposite rotation is not clear. Notwithstanding, due to the rotationally-derived nature of the “accelerated” frame, the detected signal of constant motion will be cyclic in nature and possibly cycloidal as predicted by Kopernicky.
Jan Onderco has put considerable thought and effort into understanding the dynamics and energetics of this deceptively simple mechanical system. The detection of constant linear motion in this way would have profound implications technologically as well as scientifically and philosophically if true.
George Hathaway
April 22nd, 2014
Thank you note to Hathaway Consulting Services
George and Caryl
Thank you for all your exceptional support and help.
This project would not see the light of day without your generosity.
It is hard to find words to express our gratitude.
Thank you very much,
Jaro & Jano
References
[1]Wikipedia – Postulates of special relativity; from http://en.wikipedia.org/wiki/Postulates_of_special_relativity
[2] J.L.Meriam, L.G.Kraige Engineering Mechanics Volume 2 Dynamics 7th edition, Page 159, 2012 John Wiley & Sons, Inc.
[3] 18.02A Topic 22: Vector derivatives: velocity, curvature; from http://web.mit.edu/dvp/18.01A/topic22.pdf
[4] The reference for the PDF readers to our web page https://theelectromagneticnatureofthings.com/the-special-relativity/
[5]Wikipedia – Flyby anomaly; from http://en.wikipedia.org/wiki/Flyby_anomaly
Thank you, to all the people behind the GNU Octave software, FlexiForce® Sensors, Sparkfun accelerometers and Raspberry Pi.