
May 2018
Jaroslav Kopernicky†
Jan Onderco
Abstract
The purpose of this paper is to analyze normal, tangential accelerations of circular, cycloid motions and acceleration of a harmonic oscillator that is attached to a rotating wheel, its axle is perpendicular to the ground and the wheel is in a uniform circular motion. The axle is firmly attached to a train car. The acceleration analysis is done from two inertial reference frame systems, the ground where the train moves in a straight line at a constant velocity $v$ and from within the moving train where an inertial observer sees a uniform circular motion, axle velocity $v=0$. The $dt{\to}0$ therefore momentarily comoving reference frame analysis is valid even though the train moves on the Earth surface.
The focus of the analysis are two points, $B$ – bottom of the cycloid, cusp and $T$ – top of the cycloid. The point $A$ where the harmonic oscillator is attached to the wheel follows the cycloid trajectory in the ground reference system and the point $A$ follows circular trajectory in the moving reference frame. The curvature and the angular velocity are not equal for the cycloid and the circular motions and this fact is the source of the relativity puzzle discussed in this paper.
The basis for this claim is an analysis of the wave/harmonic oscillator acceleration included in this paper as well for two different circular motions with the same centripetal acceleration, for example tangential velocity $v=1m/s$, radius $r=1m$, angular velocity $\omega=v/r=1rad/s$, the centripetal acceleration $a_{c}=v^{2}/r=1m/s^{2}$ in comparison to $v=2m/s$, radius $r=4m$, angular velocity $\omega=v/r=0.5rad/s$, the centripetal acceleration $a_{c}=v^{2}/r=1m/s^{2}$. The harmonic oscillator acceleration is not equal for these two instances due to different Coriolis accelerations even though $a_c$ is equal at point $A$.
Introduction
The experiment is using a balanced heavy steel wheel (>100kg), the rotation is driven by an electric motor with advanced feedback loop capable to control and maintain $\omega = 1rad/s$ of the wheel even though the harmonic oscillator, magnet is moving in a slot between two DC electromagnets with the repulsive magnetic polarity working as a spring as shown in Figure 1.

Figure 1: The wheel with the harmonic oscillator – top view
The experimental setup is built with the purpose to ensure the trajectory of the harmonic oscillator as shown in Figure 2 where $A_r=0.1m$ and $A_\omega=0rad$.
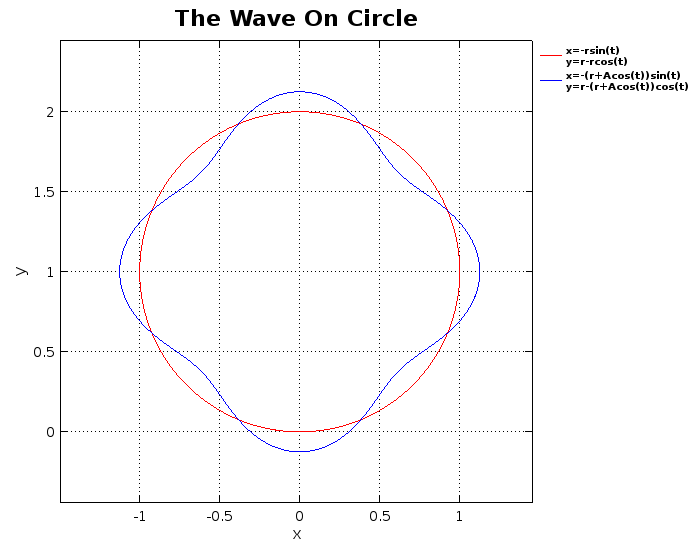
Figure 2: The wave trajectory of the harmonic oscillator as observed from within the train car when $r=1m$, $\omega=1rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0rad$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$
Our experiment is in the horizontal plane, the gravitational acceleration is $90^\circ$ to the horizontal plane, we ignore any gravity effect at the moment.
The experimental setup also overcomes all the friction, the electromagnets repulsive forces on both sides are adjusted to maintain the desired trajectory. When the trajectory is set and known then the first derivative is velocity and the second derivative is acceleration.
The Coriolis Effect
Maybe the best-known example of the Coriolis effect is a rotating figure skater. Spreading hands out slows down the rotation, pulling hands in speeds up the rotation. The same Coriolis effect is expected from the magnet that moves in the slot. When the magnet moves out, increasing the radius of magnet rotation then for example the magnet coming from radius $r=1m$ to radius $r=1.1m$ would need to increase its tangential velocity from $v=1m/s$ to tangential velocity $v=1.1m/s$ assuming the system can maintain $\omega=1rad/s$. If the system would not be able to accelerate the magnet then angular velocity $\omega$ would go down, the rotation would have slowed down. In this case though the trajectory equation would be different, it would capture the $\omega$ delta caused by the Coriolis effect and it would lead to a different acceleration analysis.
The constant $\omega=1rad/s$ is only possible in a thought experiment, the real life experiment would be just striving to achieve a constant $\omega$. This is the reason the experimental setup is described with the purpose to achieve constant $\omega$ – “a balanced heavy steel wheel (>100kg), the rotation is driven by an electric motor with advanced feedback loop capable to control and maintain $\omega = 1rad/s$ of the wheel”.
The Galilean Transformation
Our experiment deals with the small relative velocities between the reference frames $v$?$c$ therefore we will use the Galilean transformation.
The cycloid motion in the ground inertial reference frame system $K’$ is a simple constant uniform circular motion in an inertial reference frame system $K$ that moves at a constant velocity, no change in magnitude or direction of the $K$ system velocity vector.
The Galilean transformation gives us:
$x’=x+vt$ $y’=y$ $t’=t$
Let us use subsripts $\cap$ and $\circ$ for better reading.
We can write
$K’=K_{\cap}$ $x’=x_{\cap}$ $y’=y_{\cap}$ $t’=t_{\cap}$
and
$K=K_{\circ}$ $x=x_{\circ}$ $y=y_{\circ}$ $t=t_{\circ}$
Nomenclature summary
$\cap$ – cycloid subscript referencing cycloid equations and values in the ground inertial reference frame $K_{\cap}$
$\circ$ – circle subscript referencing circle equations and values in the moving inertial reference frame $K_{\circ}$
$v$ – the velocity of the moving frame
$r$ – the radius of the rotating wheel
$\theta$ – the angle of the rotation of the circle in radians
$\omega$ $\space=\frac{d\theta}{dt}=\frac{v_{t}}{r}$ ; the angular velocity of the circle, $v_{t}$ tangential velocity
The Cycloid
A circle of radius r, consisting of the points (x, y);
$x_\cap=vt-r\sin (\omega t)$
$y_\cap=r-r\cos (\omega t)$
The textbook cycloid equations.
$x_\circ=-r\sin (\omega t)$
$y_\circ=r-r\cos (\omega t)$
The textbook circle equations.
The first derivatives are the velocities;
$v_{x\cap}$$\space=\frac{dx_\cap}{dt}=$$\space v-r\omega\cos(\omega t)$
$v_{y\cap}$$\space=\frac{dy_\cap}{dt}=$$\space r\omega\sin(\omega t)$
$v_{x\circ}$$\space=\frac{dx_\circ}{dt}=$$\space -r\omega\cos(\omega t)$
$v_{y\circ}$$\space=\frac{dy_\circ}{dt}=$$\space r\omega\sin(\omega t)$
The $v_x$ and $v_y$ are components of the tangential velocity vector and the calculation of the magnitude is a straightforward vector sum.
$v_{mag\cap}=\sqrt{(v-r\omega\cos(\omega t))^2+(r\omega\sin(\omega t))^2}\\=\sqrt{v^2+r^2\omega^2(\sin ^2(\omega t) + \cos ^2(\omega t))-2vr\omega\cos(\omega t)}\\=\sqrt{v^2+r^2\omega^2-2vr\omega\cos(\omega t)}$
$v_{mag\circ}=\sqrt{(-r\omega\cos(\omega t))^2+(r\omega\sin(\omega t))^2}=\sqrt{r^2\omega^2(\sin ^2(\omega t) + \cos ^2(\omega t))}\\=\sqrt{r^2\omega^2}=r\omega$
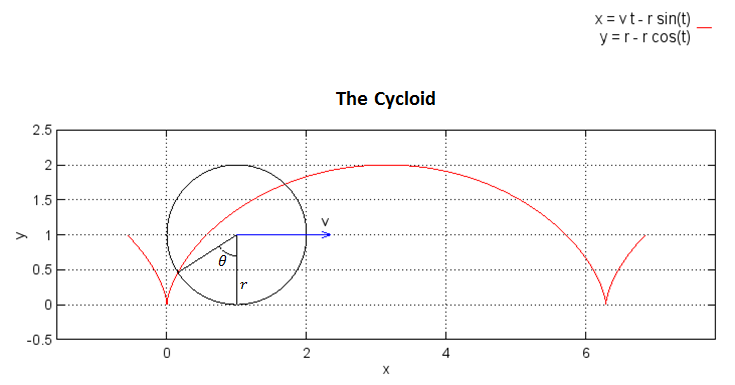
Figure 3: The cycloid

Figure 4: The cycloid and the tangential velocity magnitudes plotted on the same graph for convenience
Normal and Tangential Coordinates Analysis
The equations Eq.3$_{\cap}$ shows us that the cycloid tangential velocity magnitude in the ground frame $K_{\cap}$ changes, it is a function of $t$. The circle velocity magnitude Eq.3$_{\circ}$ in the moving frame $K_{\circ}$ is constant. The tangential velocity magnitude derivatives are the tangential accelerations;
In the $K_{\cap}$ frame Eq.4$_{\cap}$
In the $K_{\circ}$ frame Eq.4$_{\circ}$
Let us rename $a_{mag\cap}$ to $a_{t\cap}$ and $a_{mag\circ}$ to $a_{t\circ}$.
$\displaystyle a_{t\cap}\space=\frac{vr\omega^2\sin(\omega t)}{\sqrt{v^2+r^2\omega^2-2vr\omega\cos(\omega t)}}$
$\displaystyle a_{t\circ}=0$
The normal/radial acceleration is responsible for the velocity vector rotation. The normal acceleration keeps the velocity vector always tangential to the curved trajectory, it is a function of the velocity and the radius.
$\displaystyle a_n\space\space=\frac{v^2_{mag}}{R}$ Eq.5
Radius is defined by a curvature of the trajectory.
$\displaystyle R\space\space=\frac{1}{K}$ Eq.6
The curvature$^{[1]}$ is
$\displaystyle K\space\space=\frac{|x”y’-x’y”|}{((x’)^2+(y’)^2)^{3/2}}=\frac{|a_x v_y-v_x a_y|}{(v^2_{mag})^{3/2}}=\frac{|a_x v_y-v_x a_y|}{v^3_{mag}}$ Eq.7
The cycloid curvature is Eq.8?
$K_\cap\space\space$$=\frac{|r\omega^2\sin(\omega t)\space r\omega\sin(\omega t)-(v-r\omega\cos(\omega t))\space r\omega^2\cos(\omega t)|}{((v-r\omega\cos(\omega t))^2+(r\omega\sin(\omega t))^2)^{3/2}}\\=\frac{|r^2\omega^3(\sin^2(\omega t)+\cos^2(\omega t))-vr\omega^2\cos(\omega t)|}{(v^2-2vr\omega\cos(\omega t)+r^2\omega^2\cos^2(\omega t)+r^2\omega^2\sin^2(\omega t))^{3/2}}\\=\frac{|r^2\omega^3-vr\omega^2\cos(\omega t)|}{(v^2+r^2\omega^2-2vr\omega\cos(\omega t))^{3/2}}$
The circle curvature is Eq.8O
$K_\circ\space\space$$=\frac{|r\omega^2\sin(\omega t)\space r\omega\sin(\omega t)-(-r\omega\cos(\omega t))\space r\omega^2\cos(\omega t)|}{((-r\omega\sin(\omega t))^2+(r\omega\sin(\omega t))^2)^{3/2}}\\=\frac{|r^2\omega^3(\sin^2(\omega t)+\cos^2(\omega t))|}{(r^2\omega^2\cos^2(\omega t)+r^2\omega^2\sin^2(\omega t))^{3/2}}=\frac{|r^2\omega^3|}{(r^2\omega^2)^{3/2}}\\=\frac{|\omega|}{\sqrt{(r^2\omega^2)}}=\frac{1}{r}$
$a_{n\cap}=v^2_{mag\space\cap}K_\cap$
$=\frac{|r^2\omega^3-vr\omega^2\cos(\omega t)|}{\sqrt{v^2+r^2\omega^2-2vr\omega\cos(\omega t)}}$
$a_{n\circ}=v^2_{mag\space\circ}
K_\circ\space\space$$=\frac{v^2_{mag\space\circ}}{r}=$$\space\space r\omega^2$
The acceleration magnitudes are;
$a_{mag\cap}=\sqrt{a^2_{t\cap}+a^2_{n\cap}}$
$a_{mag\circ}=\sqrt{a^2_{t\circ}+a^2_{n\circ}}=r\omega^2$
The cycloid acceleration in the ground reference frame is
$a_{mag\cap}\space\space$$=\sqrt{(\frac{vr\omega^2\sin(\omega t)}{\sqrt{v^2+r^2\omega^2-2vr\omega\cos(\omega t)}})^2+(\frac{|r^2\omega^3-vr\omega^2\cos(\omega t)|}{\sqrt{v^2+r^2\omega^2-2vr\omega\cos(\omega t)}})^2}\\=\sqrt{\frac{(vr\omega^2\sin(\omega t))^2+(r^2\omega^3-vr\omega^2\cos(\omega t))^2}{v^2+r^2\omega^2-2vr\omega\cos(\omega t)}}\\=\sqrt{\frac{v^2r^2\omega^4\sin^2(\omega t)+r^4\omega^6-2r^2\omega^3vr\omega^2\cos(\omega t)+v^2r^2\omega^4\cos^2(\omega t)}{v^2+r^2\omega^2-2vr\omega\cos(\omega t)}}\\=\sqrt{\frac{r^2\omega^4(v^2(\sin^2(\omega t)+\cos^2(\omega t))+r^2\omega^2-2vr\omega\cos(\omega t))}{v^2+r^2\omega^2-2vr\omega\cos(\omega t)}}$
$\space\space\space\space=\sqrt{\frac{r^2\omega^4(v^2+r^2\omega^2-2vr\omega\cos(\omega t))}{v^2+r^2\omega^2-2vr\omega\cos(\omega t)}}$$\space=\sqrt{r^2\omega^4}=r\omega^2$Eq.10?
We come to a conclusion that both accelerations, cycloid and circular have the same magnitude. The direction of the accelerations is the same as well, the vector sum of the tangential and normal accelerations in the ground reference $K_{\cap}$ system points in the same direction as the normal acceleration in the moving reference system $K_{\circ}$.
Here is an example of tangential and normal accelerations.

Figure 5: The cycloid, the tangential velocity magnitude and the accelerations – magnitude, tangential, normal
The Wave Trajectory
The textbook wave motion equation is
$x(t) = A cos(\omega t + \phi)$ Eq.11
The motion is periodic with the amplitude $A$.
$\displaystyle \omega = \sqrt{\frac{k}{m}}$ Eq.12
The velocity of the spring periodic motion is
$\displaystyle v_s = \frac{dx(t)}{dt} = – A\omega sin(\omega t + \phi)$ Eq.13
The acceleration of the spring periodic motion is
$\displaystyle a_s = \frac{d^2x(t)}{dt^2} = – A\omega^2 cos(\omega t + \phi)$ Eq.14

Figure 6: The periodic motion acceleration $a_s$ when $A=0.1\,m$, $\omega=4\,rad/s$, $\phi=0\,rad$
A wave trajectory on a circular and cycloid motion gives us the following equations.
In the $K_{\cap}$ frame – Eq.15$_{\cap}$
$x_\cap=vt-(r+A_r cos(\omega_r t + \phi_r))\sin (\omega t +\phi+ A_{\omega} cos(\omega_{\omega} t + \phi_{\omega}))$
$y_\cap=r-(r+A_r cos(\omega_r t + \phi_r))\cos (\omega t +\phi+ A_{\omega} cos(\omega_{\omega} t + \phi_{\omega}))$
In the $K_{\circ}$ frame – Eq.15$_{\circ}$
$x_\circ=-(r+A_r cos(\omega_r t + \phi_r))\sin (\omega t +\phi+ A_{\omega} cos(\omega_{\omega} t + \phi_{\omega}))$
$y_\circ=r-(r+A_r cos(\omega_r t + \phi_r))\cos (\omega t +\phi+ A_{\omega} cos(\omega_{\omega} t + \phi_{\omega}))$

Figure 7: The wave on a circle when $r=1m$, $\omega=1rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$
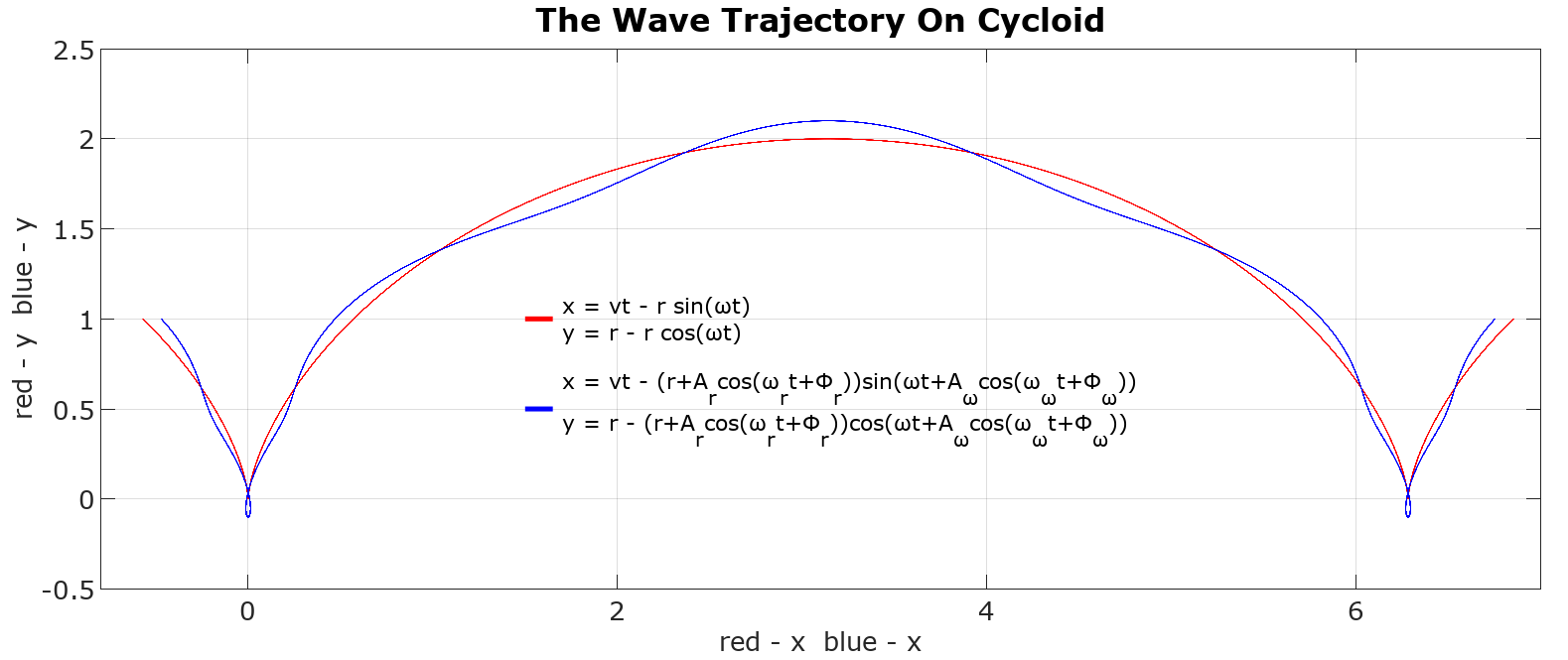
Figure 8: The wave on a cycloid when $r=1m$, $\omega=1rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$
The wave motion modulated on the circle and the cycloid motions is done through the radius and angular velocity changes. The wave radial amplitude $A_r$ is added to the radius $r$. $A_r$ changes with $cos(\omega_r t + \phi_r)$ function. The wave angular velocity amplitude $A_\omega$ is added to the radius $\omega t$. $A_\omega$ changes with $cos(\omega_\omega t + \phi_\omega)$ function. $A_r$ is traverse component and $A_\omega$ is longitudinal component of the harmonic motion.
The first derivatives are the velocities;
In the $K_{\cap}$ frame – Eq.16$_{\cap}$
$v_{x\cap}\space=\frac{dx_\cap}{dt}=\space A_r\omega_r\sin(\omega_r t+\phi_r)\sin(\omega t +\phi +A_{\omega}\cos(\omega_\omega t+\phi_{\omega}))\\ \hspace{60pt}-(r+A_r\cos(\omega_r t+\phi_r))(\omega-A_{\omega}\omega_\omega sin(\omega_\omega t+\phi_{\omega}))\cos(\omega t + \phi+A_{\omega}\cos(\omega_\omega t+\phi_{\omega})) + v$
$v_{y\cap}\space=\frac{dy_\cap}{dt}=\space A_r\omega_r\sin(\omega_r t+\phi_r)\cos(\omega t + \phi + A_{\omega}\cos(\omega_\omega t+\phi_{\omega}))\\ \hspace{60pt}+(r+A_r\cos(\omega_r t+\phi_r))(\omega-A_{\omega}\omega_\omega sin(\omega_\omega t+\phi_{\omega}))\sin(\omega t + \phi+A_{\omega}\cos(\omega_\omega t+\phi_{\omega}))$
In the $K_{\circ}$ frame – Eq.16$_{\circ}$
$v_{x\circ}\space=\frac{dx_\circ}{dt}=\space A_r\omega_r\sin(\omega_r t+\phi_r)\sin(\omega t +\phi +A_{\omega}\cos(\omega_\omega t+\phi_{\omega}))\\ \hspace{60pt}-(r+A_r\cos(\omega_r t+\phi_r))(\omega-A_{\omega}\omega_\omega sin(\omega_\omega t+\phi_{\omega}))\cos(\omega t + \phi+A_{\omega}\cos(\omega_\omega t+\phi_{\omega}))$
$v_{y\circ}\space=\frac{dy_\circ}{dt}=\space A_r\omega_r\sin(\omega_r t+\phi_r)\cos(\omega t + \phi + A_{\omega}\cos(\omega_\omega t+\phi_{\omega}))\\ \hspace{60pt}+(r+A_r\cos(\omega_r t+\phi_r))(\omega-A_{\omega}\omega_\omega sin(\omega_\omega t+\phi_{\omega}))\sin(\omega t + \phi+A_{\omega}\cos(\omega_\omega t+\phi_{\omega}))$
The velocity vector has its magnitude;
$\displaystyle v_{mag\cap}\space=\sqrt{v_{x\cap}^2+v_{y\cap}^2}$
$\displaystyle v_{mag\circ}\space=\sqrt{v_{x\circ}^2+v_{y\circ}^2}$
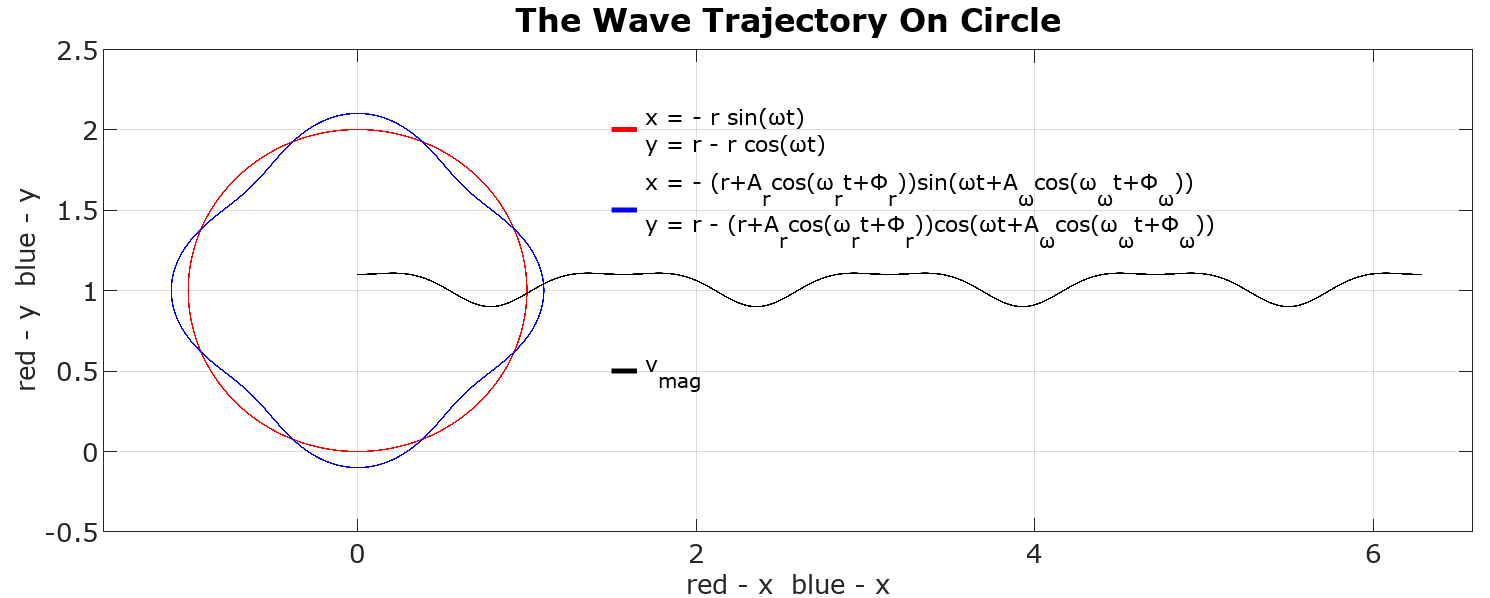
Figure 9: The wave on a circle with the $v_{mag}$

Figure 10: The wave on a cycloid with the $v_{mag}$
Wave on Circle and Cycloid – Normal and Tangential Coordinates Analysis
The tangential velocity magnitude derivatives are the tangential accelerations;
In the $K_{\cap}$ frame – Eq.18$_{\cap}$
$\displaystyle a_{t\cap}\space=\frac{dv_{mag\cap}}{dt}=\frac{d\sqrt{v_{x\cap}^2+v_{y\cap}^2}}{dt}
=\frac{1}{2\sqrt{{v_{x\cap}^2+v_{y\cap}^2}}}\frac{d[v_{x\cap}^2+v_{y\cap}^2]}{dt}\\$
$=\frac{2v_{x\cap}\frac{dv_{x\cap}}{dt}+2v_{y\cap}\frac{dv_{y\cap}}{dt}}{2\sqrt{{v_{x\cap}^2+v_{y\cap}^2}}}=\frac{v_{x\cap}a_{x\cap}+v_{y\cap}a_{y\cap}}{\sqrt{{v_{x\cap}^2+v_{y\cap}^2}}}$
In the $K_{\circ}$ frame – Eq.18$_{\circ}$
$\displaystyle a_{t\circ}\space=\frac{dv_{mag\circ}}{dt}=\frac{d\sqrt{v_{x\circ}^2+v_{y\circ}^2}}{dt}
=\frac{1}{2\sqrt{{v_{x\circ}^2+v_{y\circ}^2}}}\frac{d[v_{x\circ}^2+v_{y\circ}^2]}{dt}\\$
$=\frac{2v_{x\circ}\frac{dv_{x\circ}}{dt}+2v_{y\circ}\frac{dv_{y\circ}}{dt}}{2\sqrt{{v_{x\circ}^2+v_{y\circ}^2}}}=\frac{v_{x\circ}a_{x\circ}+v_{y\circ}a_{y\circ}}{\sqrt{{v_{x\circ}^2+v_{y\circ}^2}}}$
The normal accelerations using Eq.7 for curvature $\kappa$ are;
In the $K_{\cap}$ frame – Eq.19$_{\cap}$
$\displaystyle a_{n\cap}=v_{mag\cap}^2\kappa_{\cap}\,\,=v_{mag\cap}^2\frac{|a_{x\cap} v_{y\cap}-v_{x\cap} a_{y\cap}|}{v^3_{mag\cap}}$
In the $K_{\circ}$ frame – Eq.19$_{\circ}$
$\displaystyle a_{n\circ}=v_{mag\circ}^2\kappa_{\circ}\,\,=v_{mag\circ}^2\frac{|a_{x\circ} v_{y\circ}-v_{x\circ} a_{y\circ}|}{v^3_{mag\circ}}$
The $a_{x\cap}$, $a_{y\cap}$, $a_{x\circ}$ and $a_{y\circ}$ acceleration components are;
In the $K_{\cap}$ frame – Eq.20$_{\cap}$
$\displaystyle a_{x\cap}\space=\frac{dv_{x\cap}}{dt}=(r+A_r cos(\omega_r t+\phi_r))(\omega – A_{\omega}\omega_\omega sin(\omega_\omega t+\phi_{\omega}))^2 sin(\omega t + \phi + A_{\omega} cos(\omega_\omega t + \phi_{\omega}))\\ \hspace{60pt}+ A_r \omega_r^2 cos(\omega_r t + \phi_r) sin(\omega t + \phi + A_{\omega} cos(\omega_\omega t + \phi_{\omega}))\\ \hspace{60pt} + 2(\omega – A_{\omega} \omega_\omega sin(\omega_\omega t + \phi_{\omega})) A_r \omega_r sin(\omega_r t + \phi_r) cos(\omega t + \phi + A_{\omega} cos(\omega_\omega t + \phi_{\omega}))\\ \hspace{60pt} + (r+A_r cos(\omega_r t + \phi_r) +)A_{\omega} \omega_\omega^2 cos(\omega_\omega t + \phi_{\omega}) cos(\omega t + \phi + A_{\omega} cos(\omega_\omega t + \phi_{\omega}))$
$\displaystyle a_{y\cap}\space=\frac{dv_{y\cap}}{dt}=(r+A_r cos(\omega_r t + \phi_r))(\omega – A_{\omega}\omega_{\omega} sin(\omega_{\omega} t + \phi_{\omega}))^2 cos(\omega t + \phi + A_{\omega} cos(\omega_{\omega} t + \phi_{\omega}))\\ \hspace{60pt}+ A_r \omega_r^2 cos(\omega_r t + \phi_r) cos(\omega t + \phi + A_{\omega} cos(\omega_{\omega} t + \phi_{\omega}))\\ \hspace{60pt}- 2(\omega – A_{\omega} \omega_{\omega} sin(\omega_{\omega} t + \phi_{\omega})) A_r \omega_r sin(\omega_r t + \phi_r) sin(\omega t + \phi + A_{\omega} cos(\omega_{\omega} t + \phi_{\omega}))\\ \hspace{60pt}-(r+A_r cos(\omega_r t + \phi_r)) A_{\omega} \omega_{\omega}^2 cos(\omega_{\omega} t + \phi_{\omega}) sin(\omega t + \phi + A_{\omega} cos(\omega_{\omega} t + \phi_{\omega}))$
Equations Eq.20$_{\circ}$ for the $x$ and $y$ acceleration components in the $K_{\circ}$ frame are equal to Eq.20$_{\cap}$ equations in the $K_{\cap}$ frame.
$\displaystyle a_{x\circ}\space=a_{x\cap} $
$\displaystyle a_{y\circ}\space=a_{y\cap} $
The acceleration magnitudes are;
$\displaystyle a_{mag\cap}\space=\sqrt{a_{t\cap}^2 +a_{n\cap}^2} $
$\displaystyle a_{mag\circ}\space=\sqrt{a_{t\circ}^2 +a_{n\circ}^2} $
When equations 18, 19, 20, and 21 are entered into a plotting software, for example GNU Octave, then these are the acceleration plots.

Figure 11: The wave on a circle with the $v_{mag}$ and $a_{mag}$ when $r=1m$, $\omega=1rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$
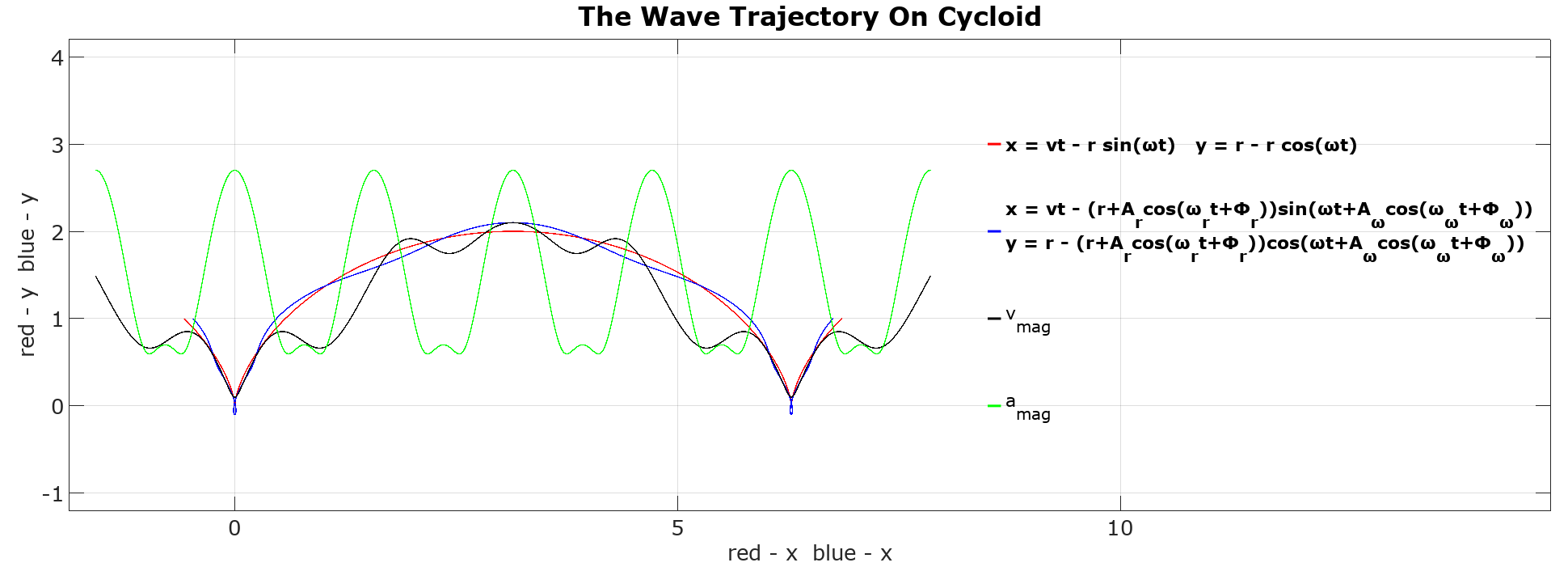
Figure 12: The wave on a cycloid with the $v_{mag}$ and $a_{mag}$ when $r=1m$, $\omega=1rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$
The acceleration analysis yields the same results for $K_{\cap}$ and $K_{\circ}$ reference frames. It appears that there is no issue with the relativity. Nevertheless the following analysis, questions and specifically answers to these questions show us better understanding of the reality.
The Equivalence Principle
Richard Feynman discussed the gravity and the principle of equivalence in his famous Lectures on Physics. He describes the spaceship experiment; accelerating with 1g and sitting at rest on the surface of the earth.
Feynman writes$^{[2]}$: “Everything is the same! You would be pressed toward the floor, a ball would fall with an acceleration of 1 g, and so on. In fact, how could you tell inside a space ship whether you are sitting on the earth or are accelerating in free space? According to Einstein’s equivalence principle there is no way to tell if you only make measurements of what happens to things inside!
To be strictly correct, that is true only for one point inside the ship. The gravitational field of the earth is not precisely uniform, so a freely falling ball has a slightly different acceleration at different places—the direction changes and the magnitude changes. But if we imagine a strictly uniform gravitational field, it is completely imitated in every respect by a system with a constant acceleration. That is the basis of the principle of equivalence.
Applying the same understanding, that the centripetal acceleration is not uniform, to the circular motion with the harmonic oscillator indicates that the different curvature/radius will generate different accelerations for the periodic motion. Here are the results:
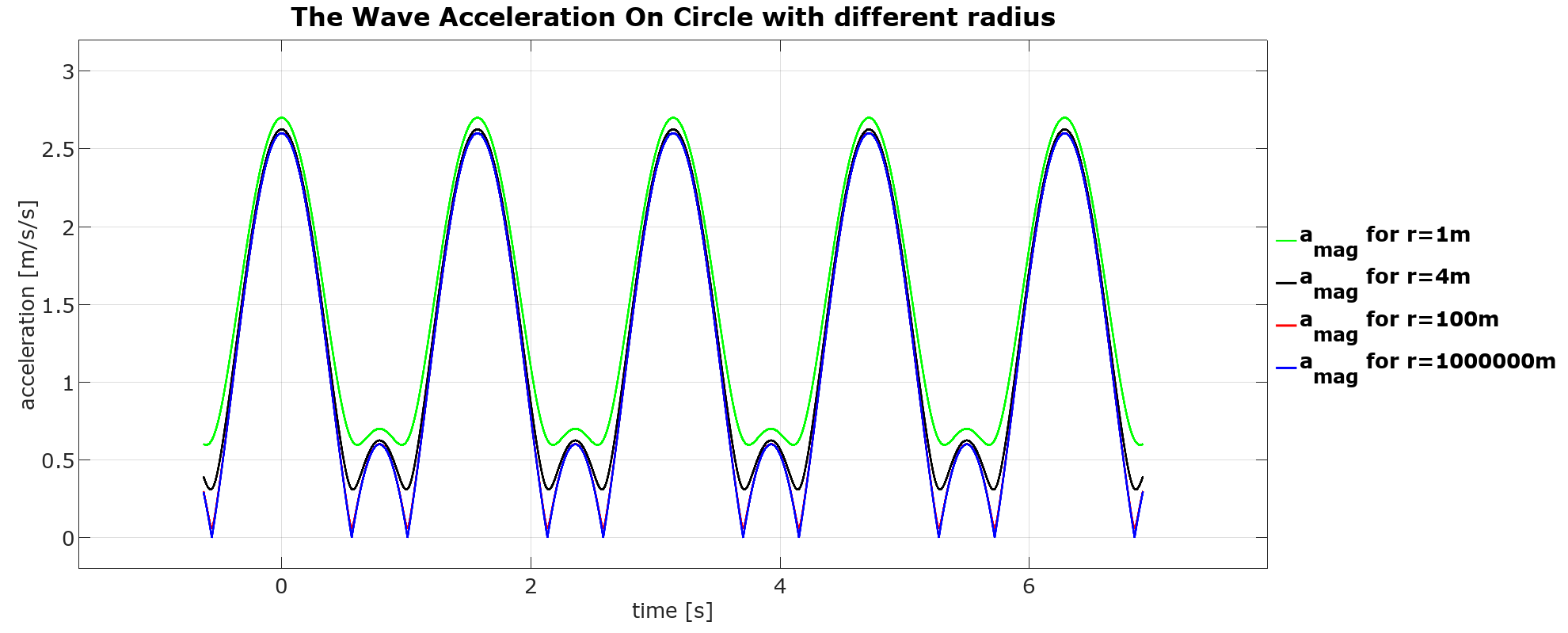
Figure 13: The wave acceleration on circles where green acceleration is for: $r=1m$, $\omega=1rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$; black acceleration is for: $r=4m$, $\omega=0.5rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$; red acceleration is for: $r=100m$, $\omega=0.1rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$; blue acceleration is for: $r=1000000m$, $\omega=0.001rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$
We can clearly see the accelerations are not equal. Here is the zoom in to the $t=0$.

Figure 14: The wave acceleration at $t=0$ on circles where green acceleration is for: $r=1m$, $\omega=1rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$; black acceleration is for: $r=4m$, $\omega=0.5rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$; red acceleration is for: $r=100m$, $\omega=0.1rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$; blue acceleration is for: $r=1000000m$, $\omega=0.001rad/s$, $A_r=0.1m$, $\omega_r=4rad/s$, $\phi_r=0rad$, $A_\omega=0m$, $\omega_\omega=0rad/s$, $\phi_\omega=0rad$
The radius is a primary factor in determining the acceleration. When the radius is bigger, $r>100m$, then the total harmonic oscillation acceleration $a_{mag}$ at $t=0$ is getting closer to be a simple summation of the centripetal acceleration $a_c=1ms^{-2}$ and the simple harmonic acceleration magnitude $a_s = 1.6ms^{-2}$ that is shown in Figure 6. The result is $a_{mag} = 2.6ms^{-2}$. For example if we assume $r=100m$ then in order to achieve $1ms^{-2}$ acceleration on the edge of the $100m$ radius wheel $\omega = 0.1rad/s$. The radius of harmonic oscillator at time $t=0$ is $r_s=r+A_r = 100+0.1 = 100.1m$. The $a_c = r \omega^2 = 100.1 * 0.1^2 = 1.001ms^{-2}$, the simple harmonic acceleration is $a_s = 1.6ms^{-2}$ and the total harmonic oscillation acceleration is $a_{mag} = a_c + a_s = 2.601ms^{-2}$. The value $2.601ms^2$ is shown in the Figue 12.
When radius is smaller, for example $r=1m$, then the harmonic oscillation radius in our example is $r_s=r+A_r = 1+0.1 = 1.1m$. The centripetal acceleration is $a_c = r \omega^2 = 1.1ms^{-2}$, the simple harmonic acceleration is $a_s = 1.6ms^{-2}$ and the total harmonic oscillation acceleration is $a_{mag} = a_c + a_s = 2.7ms^{-2}$ as per Figure 14.
The last couple of paragraphs demonstrate the role of radius/curvature in determining the uniformity of the centripetal acceleration.
The Cycloid Acceleration Analysis
Now we are ready to discuss the cycloid accelerations. All curtate cycloids up to the ideal cycloid have points where there is only one of the tangential and normal accelerations present. The radius $r\rightarrow\infty$ at the cycloid inflection points, the cycloid acceleration magnitude $a_{mag}$ has only the tangential acceleration $a_t$ component. The cycloid acceleration magnitude $a_{mag}$ has only the normal acceleration $a_n$ component at times $t$ equal to $0, \pi, 2\pi, …$ The following plot on Figure 15 demonstrates how the $K_\cap$ radius changes on a curtate cycloid.
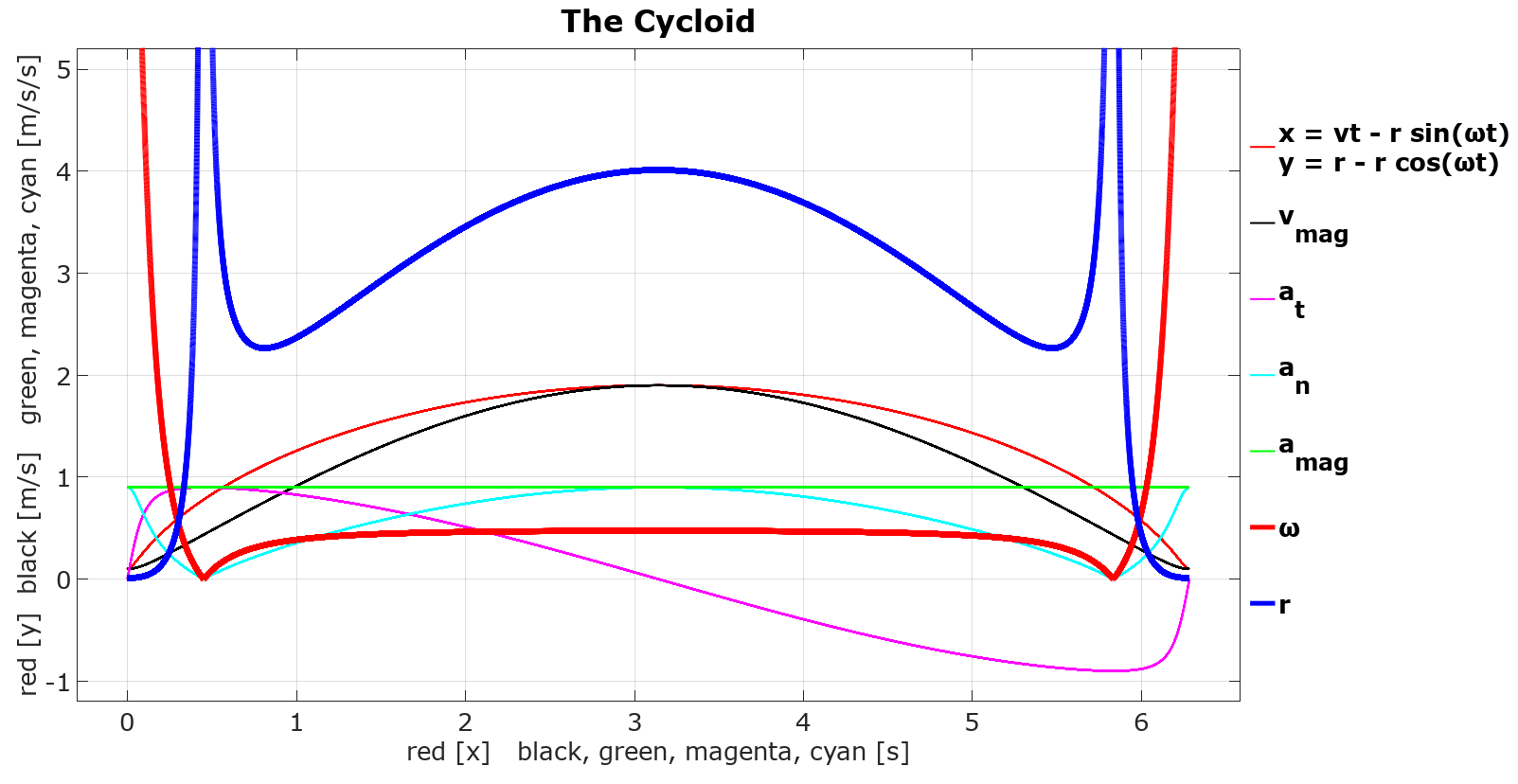
Figure 15: The curtate cycloid where $r=0.9m$, $\omega=1rad/s$
The ground/cycloid reference frame $K_\cap$ radius of the point $A$ where the harmonic oscillator is attached to the wheel is not equal to the moving $K_\circ$ reference frame point $A$ radius that is constant. If we consider the ideal cycloid and point $B$ – the bottom of the cycloid, the cusp at time $t=0, t=2\pi$ then the cycloid $a_{t\cap} = 1ms^{-2}$, $a_{n\cap} = 0ms^{-2}$ and adding the harmonic oscillator acceleration $a_s$ gives us $a_{mag\cap} = 2.6ms^{-2}$ for the $K_{\cap}$ reference frame. The same point in the $K_{\circ}$ moving reference frame gives us $a_{mag\circ} = 2.7ms^{-2}$. The end result is $a_{mag\cap} \neq a_{mag\circ}$.
The point $T$ – the top of the cycloid at time $t=\pi$ has the $a_{t\cap} = 0ms^{-2}$ and the $a_{n\cap} = a_c + a_s = r_\cap \omega_\cap^2 + a_s = 4.1 * 0.5^2 + 1.6 = 1.025 + 1.6 = 2.625ms^{-2}$. We see again that $a_{mag\cap} \neq a_{mag\circ}$.
Discussion
These are unprecedented claims. Where is the delta in the acceleration analysis coming from? The answer is straight forward. The current physics analysis gets the equality between the accelerations by ignoring $\omega_\cap$. This author points out that the Equivalence Principle does not hold in the real life conditions. This is confirmed by the shown analysis and if follows from Einstein/Feynman comments as well and this should be an indication that an issue is looming around the corner.
The question is if there is any other analysis that would support the difference in the accelerations. We will turn to energy where the rotation of the wheel in the moving reference frame is constant the moving observer sees only constant rotational kinetic energy, but the ground reference frame observer sees pendulum like motion and this leads to conversion of the potential energy to kinetic energy and back to potential energy and the cycle continues. What is energy though? We turn to Feynman’s wisdom once more from his Lectures on Physics.
Inertia and Energy
Feynman writes$^{[3]}$: “There is a fact, or if you wish, a law, governing all natural phenomena that are known to date. There is no known exception to this law—it is exact so far as we know. The law is called the conservation of energy. It states that there is a certain quantity, which we call energy, that does not change in the manifold changes which nature undergoes. That is a most abstract idea, because it is a mathematical principle; it says that there is a numerical quantity which does not change when something happens. It is not a description of a mechanism, or anything concrete; it is just a strange fact that we can calculate some number and when we finish watching nature go through her tricks and calculate the number again, it is the same.
…
Imagine a child, perhaps “Dennis the Menace,” who has blocks which are absolutely indestructible, and cannot be divided into pieces. Each is the same as the other. Let us suppose that he has 28 blocks. His mother puts him with his 28 blocks into a room at the beginning of the day. At the end of the day, being curious, she counts the blocks very carefully, and discovers a phenomenal law—no matter what he does with the blocks, there are always 28 remaining! This continues for a number of days, until one day there are only 27 blocks, but a little investigating shows that there is one under the rug—she must look everywhere to be sure that the number of blocks has not changed.
The moving observer is “in the room and sees all 28 blocks” all the time. Is the ground observer, “outside of the room” going to find out that some pendulum energy is “hidden under the rug” – in some unexpected places?
The following Figure 16 is from MATHEMATICAL METHODS FOR PHYSICISTS, 6th edition by George B. Arfken and Hans J. Weber$^{[4]}$.

Figure 16: Period of a simple pendulum.
$\frac{1}{2}ml^2(\frac{d\theta}{dt})^2 – mglcos(\theta) = – mglcos(\theta_M) \qquad $ Eq.22
The equation Eq. 22, a copy of 5.124 from the Figure 16, would be correct only for a pendulum bob that does not start to rotate when it falls from $\theta_M$. The Figure 17 shows a pendulum bob that would not rotate and if the rotational kinetic energy of the axle is ignored and the pendulum string is “mass-less” then the Eq. 22 is correct.

Figure 17: Pendulum bob with friction-less bearings. The pendulum bob does not rotate when it falls.
$\frac{1}{2}ml^2(\frac{d\theta}{dt})^2 + \frac{1}{2}I_{bob}\omega_{bob}^2 – mglcos(\theta) = – mglcos(\theta_M) \qquad $ Eq.23
The equation Eq. 23 is correct equation for a pendulum with a bob that does rotate when it falls down. We have found a hidden place where “Dennis the Menace” might have hidden the “energy blocks”. The equation Eq. 23 is more complex than Eq. 22 and it shows that Eq. 23 tangential velocity will be less than Eq. 22 tangential velocity. The smaller tangential velocity leads to smaller tangential and centripetal accelerations.
Discussion
If we turn attention to our magnet that has a freedom of motion in the slot it can be argued that the rotational kinetic energy change is seen by the moving observer as well so there should not be any issue. The change in the tangential velocity that affects the tangential and centripetal accelerations will be observed by the moving observer too.
Having said that the moving observer rotational kinetic energy change follows $\omega_\circ$. If we stay honest and faithful to pendulum energy analysis, then $\omega_\cap$ cannot be dismissed. That is the only way to make any sense for the ground reference frame observer energy analysis. It cannot be denied that $\omega_\cap$ change will translate to different rotational kinetic energy when compared to the moving observer therefore the ground observer tangential velocity change that affects the tangential and normal acceleration in the ground reference frame are going to be different. The relationship between the acceleration and $\omega$ is shown in Figure 13.
Conclusion
The equation Eq. 23 in combination with the Figure 13 analysis leads to a conclusion that the frames $K_{\cap}$ and $K_{\circ}$ are not equal for the acceleration analysis.
References
[1] 18.02A Topic 22: Vector derivatives: velocity, curvature; from http://web.mit.edu/dvp/18.01A/topic22.pdf
[2] The Feynman Lectures on Physics, MAINLY ELECTROMAGNETISM AND MATTER, Volume 2, by FEYNMAN•LEIGHTON•SANDS, Chapter 42-5, page 42-8
[3] The Feynman Lectures on Physics, MAINLY MECHANICS, RADIATION, AND HEAT, Volume 1, by FEYNMAN•LEIGHTON•SANDS, Chapter 4-1 – What is energy?, page 4-1
[4] MATHEMATICAL METHODS FOR PHYSICISTS, 6th edition by George B. Arfken and Hans J. Weber, chapter 5.8 ELLIPTIC INTEGRALS, page 371
Thank you, to all the people behind the GNU Octave software that was used for the plotting.