Jan Onderco
March 2023
Abstract
The proper acceleration is absolute, an accelerometer measures one and only one value at a point in space and time. An accelerations of combined two circular motions are being investigated using generic motion equations. Trajectory curvature radius is a primary factor in acceleration analysis and determines the absolute acceleration. Inertial observers in a relative motion do not agree on trajectory curvature radius, that makes the acceleration covariant, frame dependent. The logical conclusion is an existence of an absolute reference frame where only one absolute acceleration analysis is true, providing correct prediction for the absolute acceleration.
Introduction
The general motion acceleration analysis can be found in many textbooks.[1]

Figure 1: General motion of a rigid body in space where reference axes origin attached to B translates and rotates with angular velocity  in reference to origin
in reference to origin  . The angular velocity may differ from body angular velocity
. The angular velocity may differ from body angular velocity  .
.
The generic motion equations for velocity and acceleration of point  as per Figure 1 are
as per Figure 1 are

+2\boldsymbol{\Omega} \times \boldsymbol{v}_{rel} + \boldsymbol{a}_{rel}")
The acceleration equation represents our current understanding of general motion and it captures the ultimate case when the reference axes attached to point  rotate as well as translate. The acceleration analysis follows for a simple mechanical ‘spin-orbit simulation’, a combination of two rotations as shown in Figure 2.
rotate as well as translate. The acceleration analysis follows for a simple mechanical ‘spin-orbit simulation’, a combination of two rotations as shown in Figure 2.
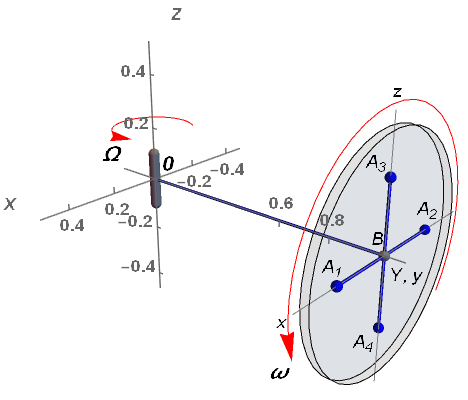
Figure 2: Spinning flywheel mounted on a rotating arm that generates flywheel ‘orbit’ around the origin of  inertial reference system. Point is the flywheel center of mass and points
inertial reference system. Point is the flywheel center of mass and points  represent center of mass of four ‘pie’ flywheel symmetrical cut-outs.
represent center of mass of four ‘pie’ flywheel symmetrical cut-outs.
A spinning flywheel is mounted on a rotating arm that generates flywheel ‘orbit’ around the origin of inertial reference system with unit vectors  . The accelerated point is the center of mass of the rotating/spinning flywheel
. The accelerated point is the center of mass of the rotating/spinning flywheel  from the origin . The origin of
from the origin . The origin of  (unit vectors
(unit vectors  ) reference system is in the point and it rotates with angular velocity. The flywheel rotation is . The points represent center of mass of four ‘pie’ flywheel symmetrical cut-outs. The first case initial values are
) reference system is in the point and it rotates with angular velocity. The flywheel rotation is . The points represent center of mass of four ‘pie’ flywheel symmetrical cut-outs. The first case initial values are

The velocity calculations are

The acceleration calculations are
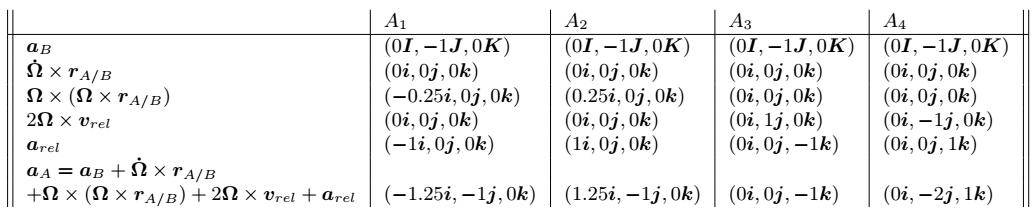
The points accelerations are a function of , , the curvature radius of is the main factor appearing in multiple acceleration components. The points  and
and  have the centripetal acceleration in
have the centripetal acceleration in  direction
direction  . The point
. The point  does not have any centripetal acceleration in the direction and the point
does not have any centripetal acceleration in the direction and the point  has
has  in the direction. The delta between and points causes a torque in the
in the direction. The delta between and points causes a torque in the  direction as per Figure 3. All four points experience the centripetal acceleration towards the center of the flywheel.
direction as per Figure 3. All four points experience the centripetal acceleration towards the center of the flywheel.

Figure 3: The green arrows represent the acceleration in the points. The torque generated between and points; the red arrow starting in the point contributes to the flywheel precession.
The relationship between , radius  is a factor influencing the and points accelerations. The following calculations maintain the same acceleration of point but points accelerations are different. The radius
is a factor influencing the and points accelerations. The following calculations maintain the same acceleration of point but points accelerations are different. The radius ") ;
; ") ;
; ") and
and ") ;
; ") ;
; ") end up with the same point instantaneous acceleration
end up with the same point instantaneous acceleration ") but the points accelerations differ as per the following table.
but the points accelerations differ as per the following table.

The inertial reference system represents a stationary grid of inertial observers in regards to the origin and we will define it as a rest frame of the spin-orbit simulation. A question arises, can we move the origin to a different observer within the same inertial observer grid? For example, can we chose ") in reference to the origin so the new
in reference to the origin so the new ?") If it is done then the acceleration calculation results are not the same based on the generic motion equations because
If it is done then the acceleration calculation results are not the same based on the generic motion equations because  changed. If the desired outcome is the have the same acceleration at point then the angular velocities and have to change but still accelerations in points , would be different when compared to origin. The accelerations at points , , are absolute and the accelerations determine the absolute angular velocities
changed. If the desired outcome is the have the same acceleration at point then the angular velocities and have to change but still accelerations in points , would be different when compared to origin. The accelerations at points , , are absolute and the accelerations determine the absolute angular velocities  .[1] The accelerations can be measured, they represent an objective reality. The curvature
.[1] The accelerations can be measured, they represent an objective reality. The curvature  [2] helps in deciding what is the true origin. The curvature
[2] helps in deciding what is the true origin. The curvature  in our case therefore curvature radius is
in our case therefore curvature radius is  and the true rotation origin is based on the normal and tangential coordinates[3] (n-t) calculations.
and the true rotation origin is based on the normal and tangential coordinates[3] (n-t) calculations.
An argument can be made the parametric equations using Cartesian/rectangular coordinates[4] have the analysis covered properly. The point moves in the  plane where
plane where ") and we can write
and we can write ") ,
, ") ,
, ") …
…

An accelerated observer at point is placed in a box around the flywheel, no signal from the outside of the box and the observer has access to points acceleration measurements. Can observer recover velocity, position equations from the acceleration all the way to  constants or that information is lost/hidden to the observer?
constants or that information is lost/hidden to the observer?
The observer measures acceleration at location. Is it a curved acceleration with some  or straight line linear acceleration? The , points accelerations answer that question. The and are recovered, so is the curvature
or straight line linear acceleration? The , points accelerations answer that question. The and are recovered, so is the curvature  and the observer can identify the true origin . Any other rest frame inertial grid observer will have position transformation. The information is not lost and it can be recovered from the inside of the box. Here, a foundation has been established for the principle, the information about the acceleration, the acceleration curvature radius, is intrinsically imprinted in the matter itself. The signal comes from the inside, it does not have to come from the outside.
and the observer can identify the true origin . Any other rest frame inertial grid observer will have position transformation. The information is not lost and it can be recovered from the inside of the box. Here, a foundation has been established for the principle, the information about the acceleration, the acceleration curvature radius, is intrinsically imprinted in the matter itself. The signal comes from the inside, it does not have to come from the outside.
Acceleration – moving inertial observers
The next step is to calculate the same ‘spin-orbit’ acceleration from moving inertial reference grid of observers. The rest frame inertial frame is named  , the
, the  inertial frame moves with velocity
inertial frame moves with velocity  along the
along the  axis in the rest frame and
axis in the rest frame and  inertial frame moves with velocity
inertial frame moves with velocity  along the axis in the rest frame .
along the axis in the rest frame .

Figure 4: The point trajectory the moving frames is the cycloid. The frame observers the point at the top/bottom of the cycloid, the frame observes the point at the cusp of the cycloid.
The rectangular coordinates point acceleration analysis agrees with the (n-t) coordinates analysis in all three inertial frames. The inertial frame observes  normal acceleration, an instantaneous pure centripetal acceleration, and the frame observes tangential acceleration, an instantaneous pure straight line linear acceleration, even though and frames do not agree on the trajectory curvature. The trajectory curvature is
normal acceleration, an instantaneous pure centripetal acceleration, and the frame observes tangential acceleration, an instantaneous pure straight line linear acceleration, even though and frames do not agree on the trajectory curvature. The trajectory curvature is  , radius is
, radius is  and the trajectory curvature is infinite, radius is
and the trajectory curvature is infinite, radius is  , a ‘singularity/black hole’. The calculation result shown below is for radius
, a ‘singularity/black hole’. The calculation result shown below is for radius  and not for
and not for  .
.
The points accelerations (n-t) coordinates results are

Three different inertial reference frames have three different results for points  while the frames agree on
while the frames agree on  accelerations. The calculation steps are listed in the Appendix. If a measurement is made with , radius values at points , A_4$ then how does the inside observer knows it is a cycloid motion and not a circular one? The consequent acceleration measurement after a
accelerations. The calculation steps are listed in the Appendix. If a measurement is made with , radius values at points , A_4$ then how does the inside observer knows it is a cycloid motion and not a circular one? The consequent acceleration measurement after a  would have to be constant for the circular trajectory but it would change for a cycloid. The acceleration and more specifically acceleration changes are absolute and unique for any trajectory.
would have to be constant for the circular trajectory but it would change for a cycloid. The acceleration and more specifically acceleration changes are absolute and unique for any trajectory.
Uniform straight line acceleration
An inertial observer can become non-inertial in following ways: straight line acceleration, rotation or combination of these two instances. The previous section already showed the trajectories of accelerated particles/observers have different shapes in moving inertial frames. The observer saw the rotating flywheel at the cusp and the observer saw the wheel at the top of the cycloid. The straight line trajectory of the straight line acceleration in the rest frame will appear as curved trajectory in frames and . The inertial frame moves with velocity along the axis in the rest frame as in the previous example and inertial frame moves with the velocity along the axis in the rest frame .

Figure 5: The point trajectory for the uniform straight line acceleration in the rest frame at time  . The and points accelerations are equal in the
. The and points accelerations are equal in the  axis direction.
axis direction.
The rotating flywheel accelerated in a straight line along axis direction with acceleration in the rest frame is expected to generate equal proper acceleration in all four points. The proper absolute acceleration is expected to be measured at points by accelerometers.
The observers ,  ,
,  are aligned at time , the position vectors are equal
are aligned at time , the position vectors are equal  at . There is no in the frame but
at . There is no in the frame but ") in frame and
in frame and ") in frame. frame observes ‘pure’ centripetal acceleration at , point
in frame. frame observes ‘pure’ centripetal acceleration at , point  moves with velocity along the
moves with velocity along the  direction and frame observes similar ‘pure’ centripetal acceleration but in opposite direction. The flywheel does not rotate around
direction and frame observes similar ‘pure’ centripetal acceleration but in opposite direction. The flywheel does not rotate around  axis direction, to compensate
axis direction, to compensate ") and
and ") in and frames. The trajectory axis rotation
in and frames. The trajectory axis rotation  is cancelled by flywheel
is cancelled by flywheel  , the same applies to frame rotations in opposite directions.
, the same applies to frame rotations in opposite directions.

Figure 6: The point trajectory for the uniform straight line acceleration as observed in (left, orange line). The point trajectory for the uniform straight line acceleration as observed in (right, cyan line). The and points accelerations are not equal in the axis direction.
Considering the change when the flywheel does not rotate around axis the acceleration calculations are different compared to results where the flywheel rotates around axis.

Only one set of values can be true in the table above. The straight line acceleration has infinite curvature radius in the (n-t) coordinates analysis. Infinity values in physics lead to singularities, discontinuations, undefined conditions, therefore the straight line acceleration does not exist. Only one inertial observer sees the straight line acceleration every other moving inertial observer sees a curved trajectory where the curvature radius is not infinity.
Equivalence Principle
Equivalence principle: as far as physical measurements are concerned, an inertial observer in a uniform gravitational field is equivalent to a uniformly accelerated observer in the absence of any gravitation field.[5]
The straight line uniformly accelerated observer does not exist. The Equivalence Principle does not hold.
The infinity curvature radius is one disqualifier why the straight line uniformly accelerated observer does not exist. The second one is the concept of momentarily comoving observers.[6] If the starting preferred inertial observer analysis is correct then the preferred observer does not agree with the analysis of comoving observers due to worldline curvature radius changes. The comoving observers maintain constant worldline curvature radius but the preferred inertial observer sees the worldline curvature change.
Equivalence Principle and Freefall
The spin orbit analysis of freefalling flywheel yield interesting results. The arm in Figure 2 is replaced with gravity. The points will have different worldlines/geodesics and accelerations because they are function of the velocity. If the flywheel is flat in orbit then instantaneous trajectories and accelerations follow a cycloid motion, they have different tangential orbital velocities. The point has bigger velocity in the gravity center inertial frame compared to point. The point has ‘bigger centrifugal acceleration’ trying to fly away. The slower with smaller ‘centrifugal acceleration’ would have tendency to fall towards the gravity source.
The points are physically held in their position by the rigidity of the flywheel, can not fly away, can not fall down; this generates the torque. The torque transforms to the precession. If the flywheel would spin in the opposite direction the precession would become a recession. The evidence are satellite flyby anomalies. The satellites have spinning reaction wheels and they exhibited precession or recession during the flyby anomalies. The satellite freefall with anomalies around a gravity source is not equivalent to the satellite floating in an intergalactic space.
Conclusion
The relativity has to be anchored in a preferred reference frame.
Acknowledgement
To the anonymous physicist[7], his gracious and noble approach to our email correspondence is highly admirable. Thank you for your invaluable feedback!
References
[1] J.L.Meriam, L.G.Kraige, Engineering Mechanics Volume 2 Dynamics 7th edition, page 528, 2012 John Wiley & Sons, Inc.
[2] Wolfram Mathworld – Curvature, from https://mathworld.wolfram.com/Curvature.html
[3] J.L.Meriam, L.G.Kraige, Engineering Mechanics Volume 2 Dynamics 7th edition, page 54, 2012 John Wiley & Sons, Inc.
[4] J.L.Meriam, L.G.Kraige, Engineering Mechanics Volume 2 Dynamics 7th edition, page 43, 2012 John Wiley & Sons, Inc.
[5] Éric Gourgoulhon, Special Relativity in General Frames, From Particles to Astrophysics, page 723, ISBN 978-3-642-37275-9, 2013.
[6] Éric Gourgoulhon, Special Relativity in General Frames, From Particles to Astrophysics, page 404, ISBN 978-3-642-37275-9, 2013.
[7] An anonymous physicist.
